


220V, 1.5kw, servomoteur de bus série Ik3, servomoteur, servomoteur, servomoteur, moteur à courant alternatif, moteur électrique pour machine d'impression
AVANTAGES DU PRODUITHautes performances · Réponse en fréquence de la boucle de courant > 2,5 kHz : précision d'échantil
Description
Informations de base
| Modèle NON. | ZSDiK3AS15EA |
| Marque | Marcher |
| Forfait transport | Carton |
| Marque déposée | MARCHER |
| Origine | Shangai, Chine |
| Code SH | 9032899090 |
| Capacité de production | 5000 pièces/an |
Description du produit
AVANTAGES DU PRODUITHaute performance· Réponse en fréquence de boucle de courant > 2,5 kHz : précision d'échantillonnage de courant de 16 bits ; algorithmes d'échantillonnage double et de mise à jour double
· Réponse en fréquence de la boucle de vitesse > 1,6 kHz : codeur absolu 23 bits ; Algorithme d'observation de Kalman
· Précision de synchronisation du bus < 0,1 us : algorithme de synchronisation multi-axes au niveau de l'anneau actuel
· Vitesse plus rapide du servomoteur : observation magnétique faible et fonction de contrôle pour que le servomoteur atteigne le maximum
vitesse en un instant
Grande adaptabilité
· Protocole de communication EtherCAT standard, adaptable à tout contrôleur de bus EtherCAT
· Avec des fonctions détaillées telles que la suppression active de la résonance, la suppression de la gigue finale, la compensation de frottement, la rainure
compensation de couple, etc., les performances d'asservissement peuvent être perfectionnées sous diverses structures mécaniques
· Procédé de peinture triple épreuve épaissie pour une meilleure adaptation environnementale (humidité, corrosion, etc.)
Plus sûr
· Avec fonction de sécurité standard internationale, SS1/SS2/SBC, sûr et fiable
Facile à utiliser
· Un panneau de commande portatif en option est disponible pour le réglage des paramètres et la surveillance de l'état du servo et du moteur,
rendre le débogage du système plus pratique
Caractéristiques:
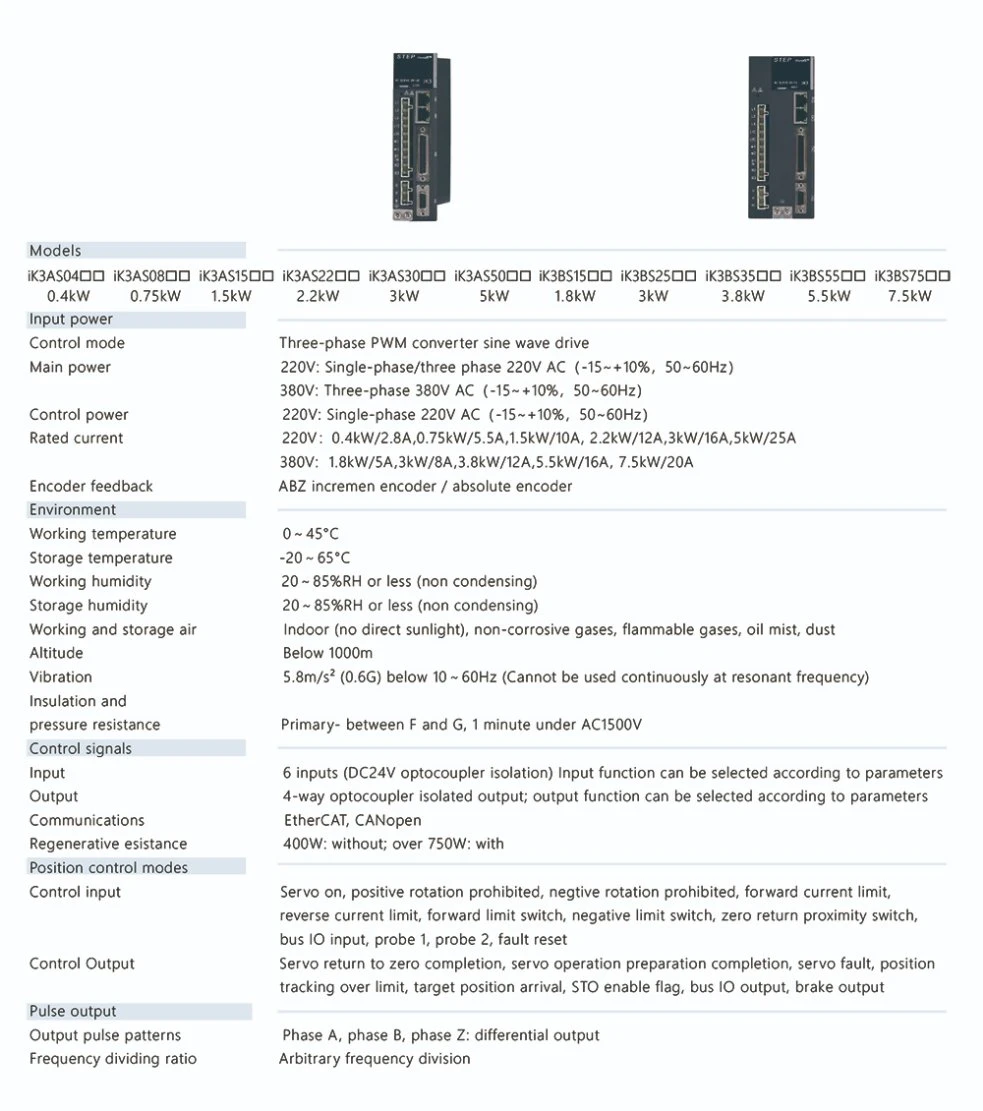
| Série | Servomoteur de bus iK3 | |||||||
| Niveau de puissance AC 220V (kW) | 1.5 | |||||||
| Courant de sortie (A) | dix | |||||||
Spécifications de base | Mode de contrôle | Contrôle IGBT PWM, mode d'entraînement à courant sinusoïdal. | ||||||
220V : redressement pleine onde mono ou triphasé. | ||||||||
Retour codeur | Type standard incrémentiel de 2500 lignes | |||||||
Codeur incrémental 17 bits | ||||||||
Conditions d'utilisation | Utilisation/stockage température*1 | 0 ~ 45 ° C (veuillez utiliser à un taux inférieur lorsque la température ambiante est égale ou supérieure à 45 ° C, et le le taux de charge moyen ne doit pas être supérieur à 80 %.)/40 ~ 70 °C | ||||||
| Humidité d'utilisation/de stockage | 90 % HR en dessous (sans condensation). | |||||||
| Résistance aux vibrations/ la résistance aux chocs | 4.9m/s2 / 19.6m/s2 | |||||||
| Altitude | En dessous de 1000m | |||||||
Spécifications de la station esclave EtherCAT | Propriétés de base de la station esclave EtherCAT | Protocole de communication | Protocole EtherCAT | |||||
| Services de soutien | Conseil de l'Europe (AOP, SDO) | |||||||
| Mode de synchronisation | Horloge distribuée en courant continu | |||||||
| Couche physique | 100BASE-TX | |||||||
| Débit en bauds | 100 Mbit/s (100Base-TX) | |||||||
| Mode recto-verso | Un duplex plein | |||||||
| Structure topologique | Anneau et type linéaire | |||||||
| Support de transmission | Un réseau blindé Super 5 ou supérieur | |||||||
| Portée d'émission | Il y a moins de 100M entre les deux nœuds (bon environnement et excellent câble). | |||||||
| Nombre de stations esclaves | Le protocole prend en charge jusqu'à 65535, mais il n'y en a pas plus de 100 en cours d'utilisation | |||||||
| Longueur de trame EtherCAT | 44~1498 octets | |||||||
| Données de processus | La taille maximale d'une seule trame Ethernet est de 1486 octets | |||||||
| Gigue de synchronisation entre deux stations esclaves | < 1us | |||||||
Temps de rafraîchissement | L'entrée ou la sortie de 1000 opérations de commutation est d'environ 30us | |||||||
| 100 axes servo sont environ 100US | ||||||||
| Taux d'erreur de communication | 10-10 Normes Ethernet | |||||||
Unité de configuration EtherCAT | Unité FMMU | 8 pièces | ||||||
| Synchronisation du magasin unités de gestion | 8 pièces | |||||||
| Données de processus RAM | 8 Ko | |||||||
| Répartition de l'horloge | 64 bits | |||||||
| Capacité EEPROM | 32Kbit | |||||||
Signaux analogiques | Entrée de commande de vitesse analogique | Tension d'entrée | -10V~ + 10V | |||||
| Couple analogique Entrée de commande | Tension d'entrée | -10V~ + 10V | ||||||
Signal d'entrée/sortie | Figure Signal d'entrée | La distribution du signal peut être modifiée | DI 5 lignes | |||||
| Fonction DI : le servomoteur permet l'interdiction de mouvement vers l'avant, l'interdiction de mouvement vers l'arrière, la restriction du courant direct, la limitation du courant inverse, l'interrupteur de fin de course avant, l'interrupteur de fin de course négatif, le commutateur de proximité de retour à zéro, l'entrée bus IO, la sonde 1, la sonde 2, la réinitialisation des défauts | ||||||||
Signal de sortie | La distribution du signal peut être modifiée | DO 3 lignes | ||||||
Fonction DO : achèvement du zéro de retour d'asservissement, achèvement de la préparation de l'opération d'asservissement, défaut d'asservissement, dépassement de la limite de suivi de position, portée de l'emplacement cible, signe d'activation STO, sortie IO du bus, sortie de freinage contractuelle | ||||||||
Capacités intégrées | Fonction de prévention de surcourse (OT) | Arrêtez immédiatement lorsque P-OT et N-OT agissent | ||||||
| Rapport de vitesse électronique | 0,1048576 ≤ B/A ≤ 419430,4 | |||||||
| Fonctions de protection | Surintensité, surtension, manque de tension, surcharge, exceptions du circuit principal, surchauffe du radiateur, manque d'une phase, survitesse, anomalie codeur, anomalie CPU, anomalie paramètre, etc. | |||||||
| Fonction d'affichage LED | CHARGE de l'alimentation principale, affichée par LED 5 bits | |||||||
| Communications RS232 | Affichage d'état, réglage des paramètres utilisateur, affichage du moniteur, affichage du suivi des alertes, fonctionnement JOG et fonctionnement d'auto-réglage, vitesse, cartographie du signal de commande de couple et autres fonctions | |||||||
| Autres | Réglage du gain, journalisation des alertes | |||||||
Système de gestion de la qualité
- Procédures de contrôle des achats
- Flux de processus de production
- Procédures de contrôle de la qualité
Application:
· Robot industriel
· Batterie au lithium
· Sculpture sur verre
· Matériel de scène
· Rectification des métaux
Entreprise:



Décerner:A remporté la marque annuelle de satisfaction des utilisateurs 2018 dans le domaine du contrôle de mouvement !
Précédent: Delta 400W 220V 3000rmp Ecm-B3m-20604ss1 AC Servomoteur Original avec Frein
Suivant: Servomoteur AC haute puissance avec frein conducteur
Notre contact
Envoyer maintenant




